
安川DX100機械安全I/F基板JANCD-YIF01-2E



制造業自動化水平提升的特征之一,是工業機器人滲透更深入更細化,為企業提質增效提供關鍵動力。但編程、部署和控制工業機器人的過程一直以來存在諸多痛點,想要讓機器人在產線上按規劃地工作,困難重重。傳統編程流程下,工程師需要手動規劃每一個機器人動作,預設其運行路徑,防止發生碰撞,存在高成本、高風險、高耗時的“三高”困擾。

針對傳統工業機器人編程的諸多痛點,業界提出了一種基于人工智能的解決方法——無碰撞運動規劃技術,其被形象地比作“機器人大腦的運動皮層”。其優化算法能同時管理多個機器人復雜動作,智能生成無碰撞的最優路徑方案,達到最佳循環時間。
Tags:
相關產品
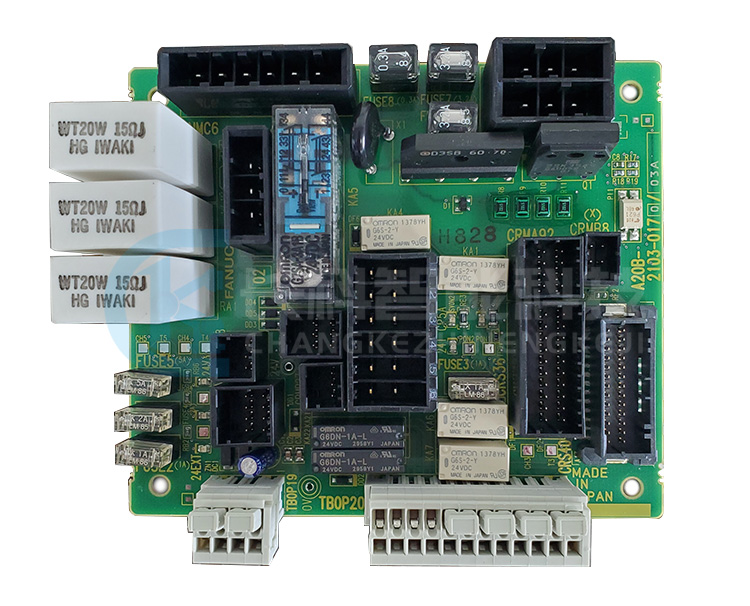
發那科R-30iB Mate Plus E-Stop急停板A20B-2103-0170 2024-12-26
庫卡C4機器人RDC編碼器盒00-217-812帶RDC板00246872 2024-12-20
